Géométrie dans l’espace 1 : Produit scalaire
.webp)
I. Produit scalaire dans l'espace :
a. Définition :
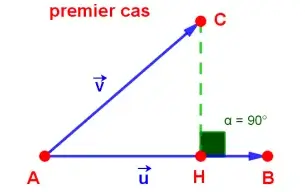
Soit \(\vec{u}\) et \(\vec{v}\) deux vecteurs non nuls de l'espace \((\mathcal{E})\) ; A et B et C trois points de \((\mathcal{E})\) tel que : \(\vec{u} = \overrightarrow{AB}\) et \(\vec{v} = \overrightarrow{AC}\) ; H est la projection de C sur la droite (AB).
Le produit scalaire de \(\vec{u}\) et \(\vec{v}\) est noté par \(\vec{u}.\vec{v}\) ou \(\overrightarrow{AB}.\overrightarrow{AC}\) tel que :
1ER cas : le produit scalaire de \(\vec{u}\) et \(\vec{v}\) est le nombre:
\(\vec{u}.\vec{v} = \overrightarrow{AB}.\overrightarrow{AC} = AB \times AH\)
premier cas
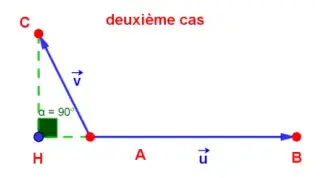
2ième cas : le produit scalaire de \(\vec{u}\) et \(\vec{v}\) est le nombre:
\(\vec{u}.\vec{v} = \overrightarrow{AB}.\overrightarrow{AC} = -AB \times AH\)
deuxième cas
Si \(\vec{u} = \vec{0}\) ou \(\vec{v} = \vec{0}\) on a \(\vec{u}.\vec{v} = 0\)
b. Remarques :
\(\vec{u}.\vec{u} = \vec{u}^2\) est le carré scalaire de \(\vec{u}\) est toujours positif .
\(\sqrt{\vec{u}.\vec{u}}\) est la norme du vecteur \(\overrightarrow{AB}\) on note : \(||\vec{u}|| = \sqrt{\vec{u}^2} = \sqrt{\vec{u}.\vec{u}} = AB\).
\(\vec{u} \perp \vec{v} \Leftrightarrow \vec{u}.\vec{v} = 0\).
\(\vec{u}.\vec{v} = ||\vec{u}|| \times ||\vec{v}|| \times \cos(\vec{u}, \vec{v})\) ou \(\overrightarrow{AB}.\overrightarrow{AC} = AB \times AC \times \cos(\overrightarrow{AB}, \overrightarrow{AC})\).
\(\vec{u}\) et \(\vec{v}\) sont colinéaires) \(\Leftrightarrow ||\vec{u}.\vec{v}|| = ||\vec{u}|| \times ||\vec{v}||\)
c. Propriétés :
Soit \(\vec{u}\) et \(\vec{v}\) et \(\vec{w}\) trois vecteurs de l'espace \((\mathcal{E})\) ; \(\alpha \in \mathbb{R}\) on a :
\(\vec{u}^2 = ||\vec{u}||^2\)
Symétrie du produit scalaire : \(\vec{u}.\vec{v} = \vec{v}.\vec{u}\).
Positivité du produit scalaire : \(\vec{u}.\vec{u} = \vec{u}^2 \ge 0\).
Non dégénéré : \(\vec{u}.\vec{u} = 0 \Leftrightarrow \vec{u} = \vec{0}\)
Linéarité du produit scalaire :
\( \begin{cases} \vec{u}.(\vec{v}+\vec{w}) = \vec{u}.\vec{v} + \vec{u}.\vec{w} \\ (\vec{v}+\vec{w}).\vec{u} = \vec{v}.\vec{u} + \vec{w}.\vec{u} \\ \vec{u}.(\alpha\vec{v}) = (\alpha\vec{u}).\vec{v} = \alpha(\vec{u}.\vec{v}) \end{cases} \)
\((\vec{u}+\vec{v})^2 = \vec{u}^2+2\vec{u}.\vec{v}+\vec{v}^2\) et \((\vec{u}-\vec{v})^2 = \vec{u}^2-2\vec{u}.\vec{v}+\vec{v}^2\) et \((\vec{u}+\vec{v})(\vec{u}-\vec{v}) = \vec{u}^2-\vec{v}^2\).
d. Application :
Soit ABCD un tétraèdre de faces régulières ( chaque face est un triangle équilatéral de coté a pour longueur ).
Montrer que deux cotés opposés sont orthogonaux ( exemple le coté opposé de [AB] est le coté [DC] ).
II. Base et repère orthonormé :
a. Rappel:
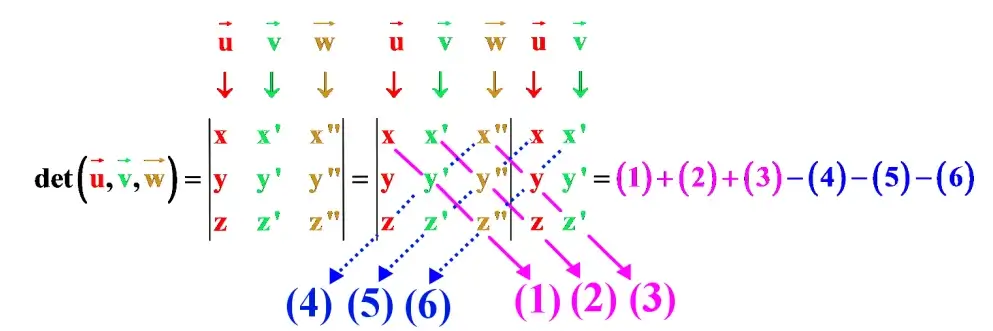
Soit \(\vec{u}(x,y,z)\) et \(\vec{v}(x',y',z')\) et \(\vec{w}(x'',y'',z'')\) trois vecteurs de l'espace \((\mathcal{E})\) rapporté à une base \((\vec{i}, \vec{j}, \vec{k})\).
Le déterminant des vecteurs \(\vec{u}\) et \(\vec{v}\) et \(\vec{w}\) dans cet ordre est le nombre :
\(det(\vec{u}, \vec{v}, \vec{w}) = \begin{vmatrix} x & x' & x'' \\ y & y' & y'' \\ z & z' & z'' \end{vmatrix} = x \begin{vmatrix} y' & y'' \\ z' & z'' \end{vmatrix} - y \begin{vmatrix} x' & x'' \\ z' & z'' \end{vmatrix} + z \begin{vmatrix} x' & x'' \\ y' & y'' \end{vmatrix}\)
\(= (xy'z''-xz'y'') + (-yx'z''+yz'x'') + (zx'y''-zy'x'')\)
\(\vec{u}\) et \(\vec{v}\) et \(\vec{w}\) sont coplanaires si et seulement si \(det(\vec{u}, \vec{v}, \vec{w}) = 0\).
b. Exemple:
Soit \(\vec{u}(1,2,3)\) et \(\vec{v}(-2,0,1)\) et \(\vec{w}(1,0,3)\)
\(\vec{u}\) et \(\vec{v}\) et \(\vec{w}\) ne sont pas coplanaires donc le triplet \((\vec{u}, \vec{v}, \vec{w})\) est une base de l'espace \((\mathcal{E})\).
On prend un point O de l'espace \((\mathcal{E})\) le quadruplet \((O,\vec{u},\vec{v},\vec{w})\) est un repère de l'espace \((\mathcal{E})\).
c. Technique :
d. Définitions :
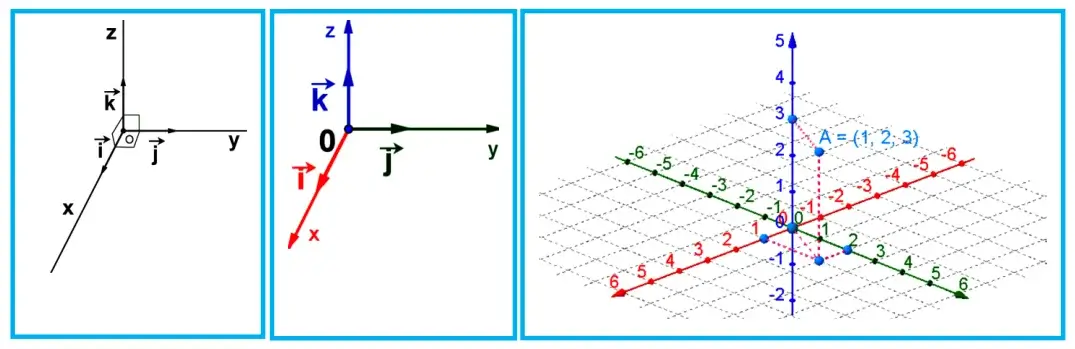
\((\vec{i}, \vec{j}, \vec{k})\) est une base de l'espace \((\mathcal{E})\) équivaut à \(\vec{i}\) et \(\vec{j}\) et \(\vec{k}\) ne sont pas coplanaires (\(det(\vec{i}, \vec{j}, \vec{k}) \ne 0\))
Prenons un point O de l'espace \((\mathcal{E})\) le quadruplé \((O,\vec{i},\vec{j}, \vec{k})\) est appelé repère de \((\mathcal{E})\)
Si \(\vec{i}.\vec{j}=\vec{i}.\vec{k}=\vec{j}.\vec{k} = 0\) et \(||\vec{i}||=||\vec{j}||=||\vec{k}||=1\) alors :
La base \((\vec{i}, \vec{j}, \vec{k})\) est une base orthonormée.
Le repère \((O,\vec{i},\vec{j}, \vec{k})\) est un repère orthonormé .
Le reste de ce chapitre ; on considère l'espace \((\mathcal{E})\) est muni d'un repère orthonormé \((O,\vec{i},\vec{j},\vec{k})\).
On prend \(\vec{u}(x,y,z)=x\vec{i}+y\vec{j}+z\vec{k}\) et \(\vec{v}(x',y',z')=x'\vec{i}+y'\vec{j}+z'\vec{k}\) et \(M(x,y,z)\) et \(A(x_A,y_A,z_A)\) et \(B(x_B,y_B,z_B)\) et \(C(x_C,y_C,z_C)\).
III. Expression analytique de \(\vec{u}.\vec{v}\)
a. Activité:
On a: \(\vec{u}.\vec{v}=(x\vec{i}+y\vec{j}+z\vec{k}).(x'\vec{i}+y'\vec{j}+z'\vec{k})\) on utilise la linéarité du produit scalaire donner \(\vec{u}.\vec{v}\) en fonction de x et y et z et x' et y' et z'.
Ecrire \(||\vec{u}||\) en fonction de x et y et z.
Donner la distance \(AB = ||\overrightarrow{AB}||\) en fonction de xA et yA et zA et de xB et yB et zB.
Donner la propriété .
b. Propriété :
Le produit scalaire de \(\vec{u}\) et \(\vec{v}\) est : \(\vec{u}.\vec{v} = \begin{pmatrix} x \\ y \\ z \end{pmatrix}.\begin{pmatrix} x' \\ y' \\ z' \end{pmatrix} = xx'+yy'+zz'\) .
La norme du vecteur \(\vec{u}\) est : \(||\vec{u}|| = \sqrt{\vec{u}.\vec{u}} = \sqrt{x^2+y^2+z^2}\) .
La distance AB est : \(AB = \sqrt{(x_B-x_A)^2 + (y_B-y_A)^2 + (z_B-z_A)^2}\).
c. Application :
Soit \(\vec{u}(1,2,3)\) et \(\vec{v}(5,7,4)\) deux vecteurs et \(A(1,5,7)\) et \(B(2,9,8)\) deux points de l'espace \((\mathcal{E})\).
Calculons : \(\vec{u}.\vec{v}\) et \(||\vec{u}||\) et \(||\vec{v}||\) et \(AB\).
IV. Ensemble des points \(M(x,y,z)\) tel que : \(\overrightarrow{AM}.\vec{u} = k\) avec \(\vec{u}(a,b,c)\) ; \((\vec{u} \ne \vec{0})\) :
a. Propriété :
\(A(x_A,y_A,z_A)\) est un point et \(\vec{u}(a,b,c)\) est un vecteur non nul de l'espace \((\mathcal{E})\) et \(k \in \mathbb{R}\) l'ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) tel que \(\overrightarrow{AM}.\vec{u} = k\) est un plan \((P)\) d'équation de la forme : \(ax+by+cz+d = 0\).
b. Application :
Soient \(A(1,1,1)\) et \(\vec{u}(0,1,0)\).
On détermine \((P)\) ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) tel que \(\vec{u}.\overrightarrow{AM} = 0\)
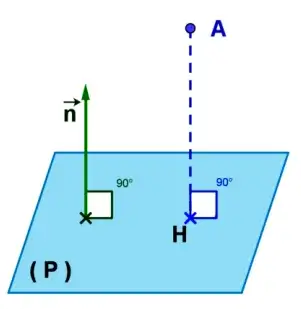
V. Plan déterminer par un point et un vecteur normal :
01. Vecteur normal à un plan :
a. Définition :
Tout vecteur \(\vec{n}\) non nul sa direction est perpendiculaire au plan \((P)\) s'appelle vecteur normal au plan \((P)\).
b. Remarques :
\(\vec{n}\) est normale au plan \(P(A,\vec{u},\vec{v})\) alors \(\vec{n} \perp \vec{u}\) et \(\vec{n} \perp \vec{v}\).
Si \(\vec{n}\) est normale au plan \((P)\) et passe par A le plan \((P)\) est noté par \(P(A,\vec{n})\).
IV. Ensemble des points \(M(x,y,z)\) tel que : \(\overrightarrow{AM}.\vec{u} = k\) avec \(\vec{u}(a,b,c)\) ; \((\vec{u} \ne \vec{0})\) :
a. Propriété :
\(A(x_A,y_A,z_A)\) est un point et \(\vec{u}(a,b,c)\) est un vecteur non nul de l'espace \((\mathcal{E})\) et \(k \in \mathbb{R}\) l'ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) tel que \(\vec{u}.\overrightarrow{AM} = k\) est un plan \((P)\) d'équation de la forme : \(ax+by+cz+d = 0\).
02. Ensemble des points \(M(x,y,z)\) tel que \(ax + by + cz + d = 0\) :
a. Propriété :
L'ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) qui vérifie \(ax+by+cz+d=0\) avec \((a,b,c) \ne (0,0,0)\) est le plan et le vecteur non nul \(\vec{n}(a,b,c)\) est un vecteur normal à ce plan .
b. Application :
Que représente l'ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) qui vérifie \(x+2y-z+4=0\).
03. Ensemble des points \(M(x,y,z)\) tel que \(\vec{n}.\overrightarrow{AM} = 0\) :
a. Propriété :
\(\vec{n}(a,b,c) \ne \vec{0}\) est un vecteur non nul et \(A(x_A,y_A,z_A)\) est un point de l'espace \((\mathcal{E})\).
L'ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) qui vérifie : \(\overrightarrow{AM}.\vec{n} = 0\) est le plan \((P)\) qui passe par A et le vecteur \(\vec{n}\) est un vecteur normal à ce plan ( c.à.d. \(P(A,\vec{n})\)).
Le plan \((P)\) a pour équation cartésienne de la forme \(ax+by+cz+d=0\) avec \(d=-(ax_A+by_A+cz_A)\)
b. Application :
On détermine une équation cartésienne du plan \((P)\) passant par le point \(A(2,1,-3)\) et \(\vec{n}(1,1,2)\) est un vecteur normal à \((P)\).
c. Propriété:
Tout plan \(P(A,\vec{n}(a,b,c))\) a pour équation cartésienne de la forme \(ax+by+cz+d=0\) la réciproque avec \((a,b,c)\ne(0,0,0)\).
d. Preuve :
Soit \(A\) un point de l'espace et \(\vec{u} \neq \vec{0}\) un vecteur. L'ensemble des points \(M\) tels que \(\vec{AM} \cdot \vec{u} = 0\) est un plan.
Preuve :
- Soit \(M(x,y,z)\) un point de l'espace.
- Écrivons \(\vec{AM} = (x - x_A, y - y_A, z - z_A)\) et \(\vec{u} = (a, b, c)\).
- Le produit scalaire s'écrit :
- Posons \(\vec{AM} \cdot \vec{u} = 0\), on obtient :
- En développant :
- Soit \(d = ax_A + by_A + cz_A\). Alors l'équation du plan est :
- Cela montre que l'ensemble des points \(M\) est bien un plan d'équation cartésienne.
\[ \vec{AM} \cdot \vec{u} = (x - x_A)a + (y - y_A)b + (z - z_A)c \]
\[ a(x - x_A) + b(y - y_A) + c(z - z_A) = 0 \]
\[ ax + by + cz - (ax_A + by_A + cz_A) = 0 \]
\[ ax + by + cz = d \]
e. Application :
On donne l'équation du plan \(P(O,\vec{i},\vec{j})\) et le point \(A(0,0,m)\) avec \(m \in \mathbb{R}\).
VI. Distance d'un point à un plan :
a. Définition :
\((P)\) est un plan et \(A\) est un point de l'espace \((\mathcal{E})\) et \(H\) est la projection orthogonale de \(A\) sur le plan \((P)\) la distance du point \(A\) au plan \((P)\) est \(AH\) et on note \(AH = d(A,(P))\).
b. Exemple :
c. Propriété :
\((P)\) est un plan et \(A(x_A,y_A,z_A)\) est un point de l'espace \((\mathcal{E})\) tel que \((P)\) a pour équation \((P) : ax + by + cz+ d = 0\).
La distance du point \(A\) au plan \((P)\) est \(AH = d(A,(P)) = \frac{|ax_A+by_A+cz_A+d|}{\sqrt{a^2+b^2+c^2}}\)
d. Preuve :
Soit \(P\) un plan d'équation \(ax + by + cz + d = 0\) et \(M_0(x_0, y_0, z_0)\) un point de l'espace. Nous cherchons la distance \(d(M_0, P)\).
Preuve :
- Le vecteur normal au plan est \(\vec{n} = (a, b, c)\).
- Si \(H\) est la projection orthogonale de \(M_0\) sur le plan, alors \(\vec{M_0H} \parallel \vec{n}\).
- On peut écrire \(\vec{M_0H} = \lambda \vec{n}\), avec \(\lambda \in \mathbb{R}\).
- Le point \(H\) appartient au plan, donc :
- Développons :
- Résolvons pour \(\lambda\) :
- La distance est la norme de \(\vec{M_0H}\) :
\[ a(x_0 - \lambda a) + b(y_0 - \lambda b) + c(z_0 - \lambda c) + d = 0 \]
\[ a x_0 + b y_0 + c z_0 - \lambda (a^2 + b^2 + c^2) + d = 0 \]
\[ \lambda = \frac{a x_0 + b y_0 + c z_0 + d}{a^2 + b^2 + c^2} \]
\[ d(M_0, P) = \|\vec{M_0H}\| = |\lambda| \cdot \|\vec{n}\| = \frac{|a x_0 + b y_0 + c z_0 + d|}{\sqrt{a^2 + b^2 + c^2}} \]
e. Application :
On considère le plan d'équation \((P)x+3y-5z+1=0\).
Est-ce que : \(A(1,1,1) \in (P)\)
Donner la distance \(d(A,(P))\)
VII. Parallélisme et orthogonalité des droites et des plans :
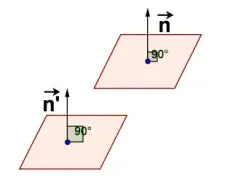
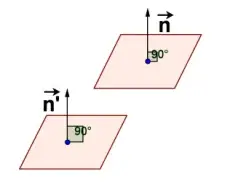
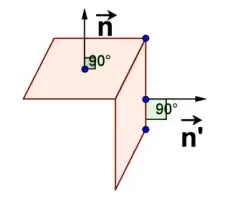
01. Parallélisme et orthogonalité de deux plans :
a. Propriétés :
\((P_1): ax+by+cz+d=0\) et \((P_2): a'x + b'y+c'z+d'=0\)
\((P_2)||(P_1) \Leftrightarrow (\vec{n}\) et \(\vec{n'}\) sont colinéaires)
\((P_2)||(P_1) \Leftrightarrow \frac{a}{a'} = \frac{b}{b'} = \frac{c}{c'}\) (non nuls)
\((P_2) || (P_1) \Leftrightarrow \mathcal{D}_1 = \mathcal{D}_2 = \mathcal{D}_1 \cap \mathcal{D}_2 \ne \emptyset\) (\(\vec{n}\) et \(\vec{n'}\) )
\((P_2)||(P_1) \Leftrightarrow \vec{n}=\alpha\vec{n}\)
\((P_2) \perp (P_1) \Leftrightarrow \vec{n}.\vec{n'} = 0\)
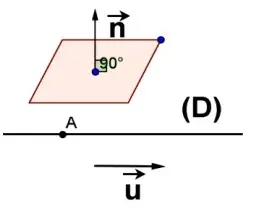
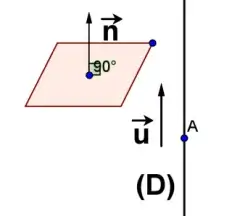
02. Parallélisme et orthogonalité d'une droite et un plan :
\(P(B,\vec{n})\) et \(D(A,\vec{u})\) et \((P): ax+by+cz+d=0\)
\((D) || (P) \Leftrightarrow \vec{u}.\vec{n} = 0\)
\((D) \perp (P) \Leftrightarrow (\vec{n}\) et \(\vec{u}\) sont colinéaires)
VIII. Etude analytique du sphère :
01. Sphère:
a. Définition :
\(\Omega\) est un point donné de l'espace \((\mathcal{E})\) et \(R > 0\) l'ensemble des points \(M(x,y,z)\) de l'espace \((\mathcal{E})\) tel que \(\Omega M = R\) s'appelle le sphère de centre \(\Omega\) et de rayon \(R\) on note \((S)\) ou \(S(\Omega,R)\).
02. Equation cartésienne d'une sphère :
a. Définition propriété :
Equation cartésienne de \((S) = S(\Omega(a,b,c),r)\) est : \(M(x,y,z) \in (S) \Leftrightarrow \Omega M = R\) ou
\((x-a)^2+(y-a)^2+(z-a)^2 = R^2\) ou bien : \(x^2 + y^2 +z^2-2ax - 2by - 2cz + d = 0\) avec \(d = a^2 + b^2 + c^2 – R^2\)
b. Application :
On donne l'équation cartésienne du sphère \(S(O(0,0,0),1)\)
on a : \((x-0)^2+(y-0)^2 + (z-0)^2 = 1^2 \Leftrightarrow x^2+y^2+z^2=1\).
Conclusion : l'équation cartésienne du sphère \(S(O(0,0,0),1)\) est \(x^2 + y^2 + z^2 = 1\).
03. Equation cartésienne du sphère déterminé par un diamètre [AB].
a. Définition :
\(\Omega\) est le milieu de \([AB]\); \([AB]\) est un diamètre du sphère \((S)\) donc A et B appartiennent à \((S)\)
On dit la sphère de diamètre \([AB]\) on note \((S)\) ou \(S_{[AB]}\).
b. Propriété :
Equation cartésienne de \(S_{[AB]}\) est : \(M(x,y,z) \in S_{[AB]} \Leftrightarrow \overrightarrow{MA}.\overrightarrow{MB} = 0\)
ou bien \((x-x_A)(x-x_B)+(y-y_A)(y-y_B)+(z-z_A)(z-z_B)=0\).
c. Preuve:
Soit I le milieu de \([AB]\) (centre du sphère \((S)\)).
d. Exemple:
Soient \(A(0,1,0)\) et \(B(0,-1,0)\) deux points de l'espace \((\mathcal{E})\).
On détermine l'équation cartésienne du sphère \(S_{[AB]}\) :
04. L'ensemble des \(M(x,y,z)\) de l'espace \((\mathcal{E})\) tel que \(x^2 + y^2 +z^2 + ax+by+cz+d = 0\) :
a. Propriété :
L'ensemble des \(M(x,y,z)\) de l'espace \((\mathcal{E})\) tel que \(x^2 + y^2 +z^2 + ax+by+cz+d=0\) avec a et b et c et d de \(\mathbb{R}\) on pose \(A = a^2+b^2+c^2-4d\) est :
\((E) = \emptyset\) si \(A < 0\).
\((E) = \Omega\left(-\frac{a}{2}, -\frac{b}{2}, -\frac{c}{2}\right)\) si \(A = 0\).
Le Sphère \((E) = S\left(\Omega\left(-\frac{a}{2}, -\frac{b}{2}, -\frac{c}{2}\right), R = \frac{\sqrt{A}}{2}\right)\) si \(A > 0\).
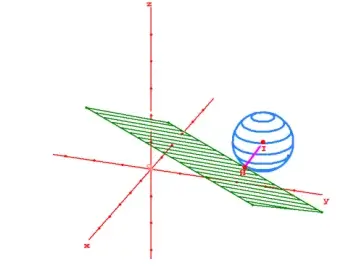
IX. Positions relatives d'une sphère et un plan :
01. Positions et les schémas et théorème:
a. Intersection d'un plan \((P)\) et une sphère \((S)\)
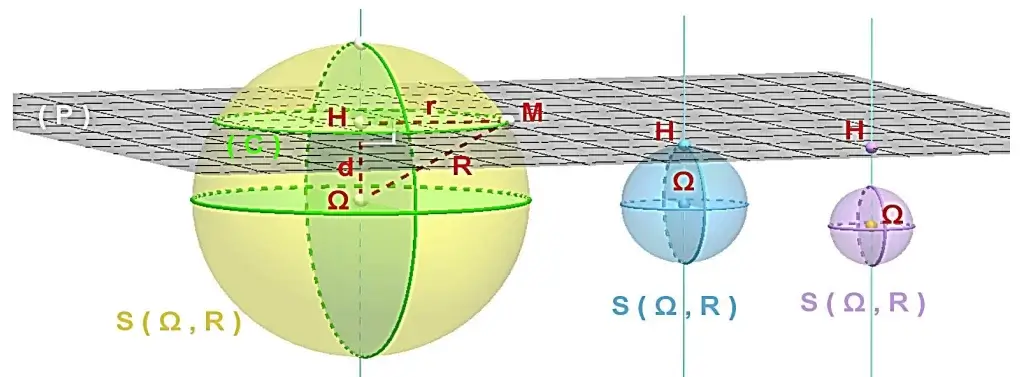
b. Théorème :
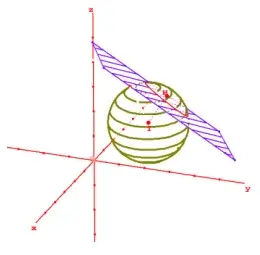
3ième CAS : \(d = \Omega H < R\) on a \((P)\cap(S) = (\mathcal{C})\)
\((P)\) coupe \((S)\) suivant le cercle de centre H et de rayon \(R_c = \sqrt{R_s^2-d^2}\) \(R_c = r\) et \(R_s = R\)
2ième CAS : \(d = \Omega H = R\) on a \((P)\cap(S) = \{H\}\) \((P)\) et \((S)\) sont tangents en H avec \((\overrightarrow{H\Omega}) \perp (P)\)
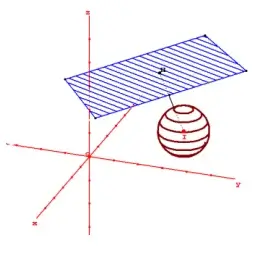
1ER CAS : \(d = \Omega H > R\) on a \((P)\cap(S) = \emptyset\)
\((P)\) et \((S)\) son disjoints
X. Positions relatives d'une sphère et une droite :
01. Positions et les schémas et théorème :
a. Intersection d'une droite \((D)\) et une sphère \((S)\)
3ème CAS :
2ème CAS
1ER CAS :
b. Théorème
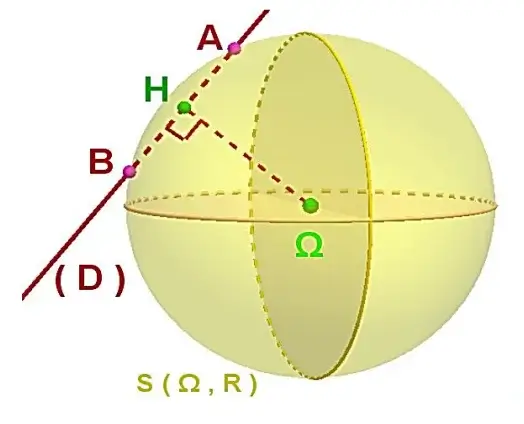
3ième CAS : \((D)\cap(S) = \{A,B\}\)
\((D)\) coupe \((S)\) en deux points A et B (Deux points mais pas le segment [AB])
CONDITION : \(d = \Omega H < R\)
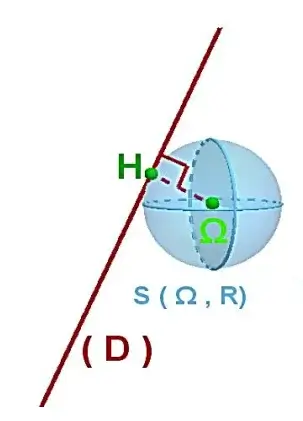
2ième CAS : \((D)\cap(S) = \{H\}\)
\((D)\) et \((S)\) sont tangents en H avec \((\overrightarrow{H\Omega}) \perp (D)\)
CONDITION : \(d = \Omega H = R\)
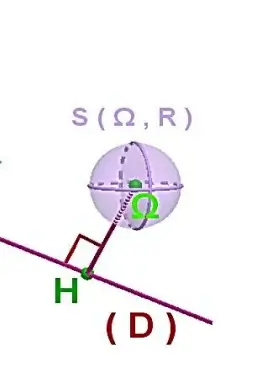
1ER CAS : \((D)\cap(S) = \emptyset\)
\((D)\) et \((S)\) son disjoints
CONDITION : \(d = \Omega H > R\)
REMARQUES
H est la projection de \(\Omega\) sur \((D)\).
Si \((D) = D(K,\vec{u})\) on a \(d = \Omega H = \frac{||\overrightarrow{K\Omega} \wedge \vec{u}||}{||\vec{u}||}\)